Параметр Значение
Грузоподъемность 2 кг
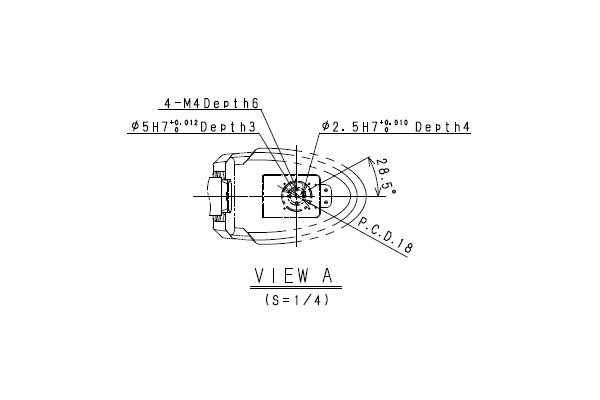
Точность 0.05 мм
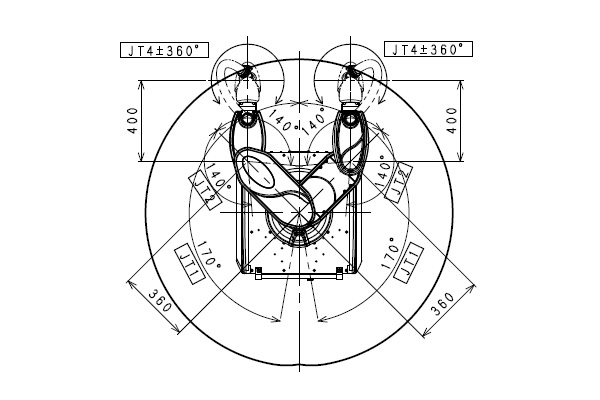
Ось 4×2 руки
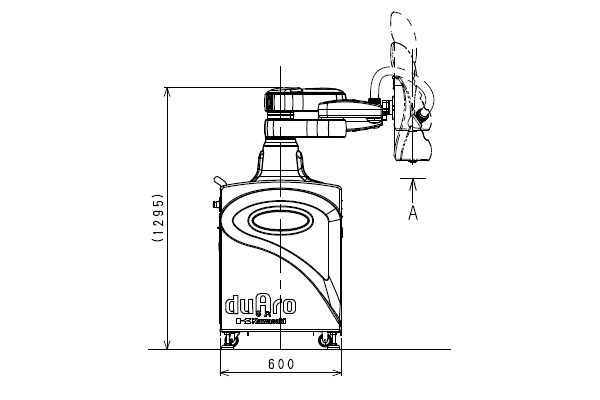
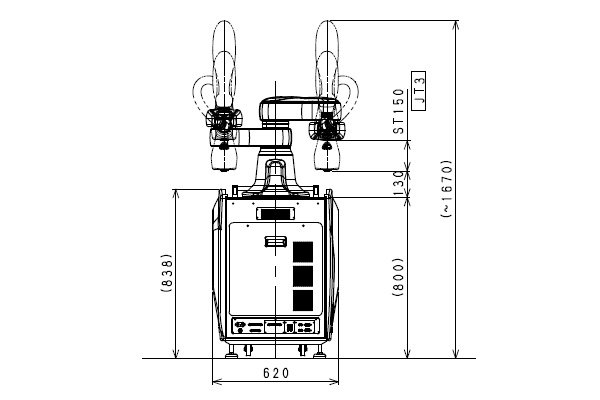
Тип Горизонтальный шарнирный робот
Монтажное положение Пол
Температурный режим 5–40°C
Относительная влажность 35–85% (строгое отсутствие конденсата или инея)
Вес 200 кг
Сустав Нижняя рука Верхняя рука
Рука вращение (JT1) -170 - +170° -140 - +500°
Рука вращение (JT2) -140 - +140° -140 - +140°
Рука вверх-вниз (JT3) 0 - +150 *1° 0 - +150 *1°
Запястье поворот (JT4) -360 - +360 *1° -360 - +360 *1°