Параметр Значение
Грузоподъемность 180 кг
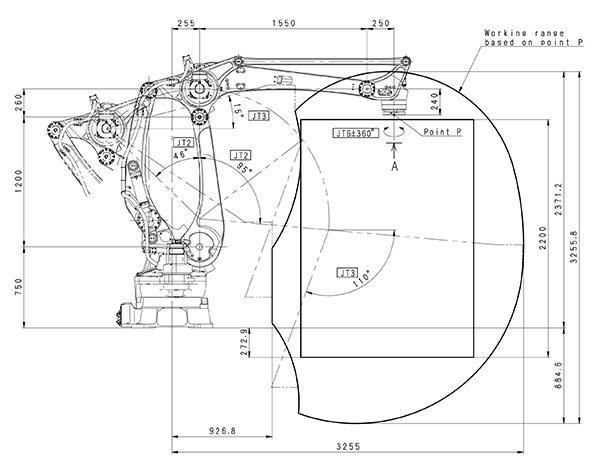
Радиус 3255 мм
Точность 0.5 мм
Ось 4
Тип Шарнирный робот
Монтажное положение Пол
Температурный режим 0–45°C
Относительная влажность 35–85% (строгое отсутствие конденсата или инея)
Вес 1,600 кг
Сустав Диапазон Скорость
Рука вращение (JT1) ±160° 140*2°/с
Рука вперед-назад (JT2) +95 - −46° 125*2°/с
Рука вверх-вниз (JT3) +15 - −110° 130*2°/с
Запястье поворот (JT4) ±360° 400*2°/с