Параметр Значение
Грузоподъемность 13 кг
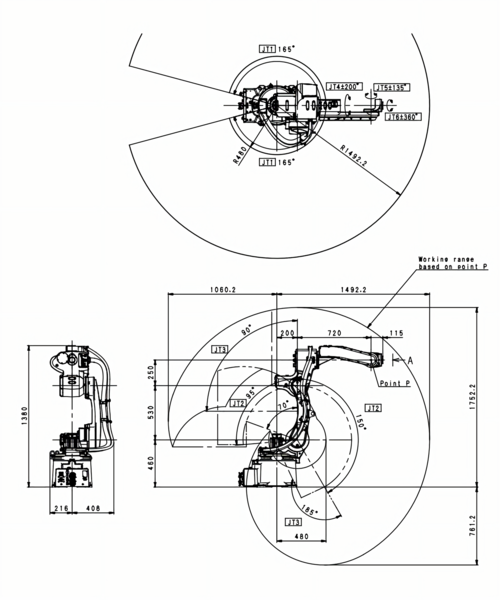
Радиус 1492 мм
Точность 0.04 мм
Ось 6
Тип Шарнирный робот
Монтажное положение Пол
Температурный режим 0–45°C
Относительная влажность 35–85% (строгое отсутствие конденсата или инея)
Вес 260 кг
Сустав Диапазон Скорость
Рука вращение (JT1) ±165° 265°/с
Рука вперед-назад (JT2) +150 - −95° 250°/с
Рука вверх-вниз (JT3) +90 - −185° 265°/с
Запястье поворот (JT4) ±200° 470°/с
Запястье сгиб (JT5) ±135° 475°/с
Запястье вращение (JT6) ±360° 730°/с